
エンジニア部署のマネージャーとなった彼は、現場からは少し離れ、部下のケアやサービス提案のフロント業務などに日々邁進していた。
そんな彼は、同じくフロント業務をこなす右腕社員と共に、よく話し合っていた。
「最近、あんまり技術触れてないですね。」
寂しさと焦りと、そしてそれらに反して誇らしさを含んだ、彼らの経験を感じさせる物言いである。
ある日も彼らは、そんな話をしながら提案資料とにらめっこしていた。そこにマーケティング部長が、企みの表情を浮かべながら声をかける。
「電子工作とかって、好き?」
思わぬ問いに、「ラ、ラズパイなら少々……あ、あとミニ四駆。」と答える彼ら。
ラズパイ(Raspberry Pi)とは、小型ながらLinuxなどのOSを稼働させることができるコンピュータで、センサーやモジュールといった電子部品を接続&制御できることから、IoTや電子工作の分野で世界的人気を誇る商品である。
そうしたやり取りをきっかけに、部長から【STAR★FLAP 出発進行!】各駅停車「自動パタパタ展示」行き プロジェクトの概要が伝えられた。
初めは「やってる時間あるかいっ」と思いながら聞いていた彼らだったが、嬉々としてパタパタ展示の魅力を語る部長に、次第に心を動かされ、鼻息荒く「モーターの制御はラズパイで楽勝でしょう!」と豪語するのであった。
目次
停車駅
プロジェクトおさらい
どうもこんにちは。「彼」あらため自動パタパタの組み込み担当、森屋です。
↓のロードマップでいう「フェーズ2」の部分を、組み込み班メンバーとして担当しました。パタパタを動かすための回転軸を、自動で回転させるというミッションを担うチームです。

星光さんが販売する「STAR★FLAP」は内部に自動機構を持たず、外部からの力で回転軸を回す必要があります。 始発駅で紹介した動画では、モーターの回転力をギアを通して伝えていました。
というわけで、ある意味ゴールは既に見えていました。モーターとギアで、自動パタパタは実現可能です。勇み足気味に始めてしまった自動化ですが、退路はありました。最悪の結果、ラズパイでやれなくても大丈夫。
しかし退路があることが、逆に私たちを燃えさせてくれました。
- ラズパイだったらどんな回転が実現できるだろう?
- 起動/停止はどのように制御する?
- インターネットに繋がっていたら?
とどんどん溢れ出るアイデアに、心が躍ります。
そう、我々はインフラエンジニア。インフラエンジニアはゼロイチよりイチヒャクのエンジニアが多く、既にあるものを組み合わせて新たな価値を作ることが、異常に得意な集団なのです(あくまで個人の意見であり、社を代表する意見ではありません)。
当社の組み込みエンジニア事情
さて。
そんなこんなでラズパイでモーターの速度や停止/起動を制御するという挑戦を始めた彼らだが、ここで当社ディーネットの組み込みエンジニア事情について触れておこう。
まず、事業としては殆どかかわりが無い。
サーバーやネットワーク機器といったハードウェアに触れる機会はあるものの、部品の交換程度で、組み込みプログラミングなどはメーカーにお任せだ。
そして参加メンバーはラズパイを触ったことがあるといっても、センサーでちょこっと遊んだ程度の経験。モーターの制御のような組み込み系のプログラミングなどは、一切経験がない状況であった。
アイデアだけはいっちょまえに色々湧いてくるものの、答えはどれも「できるんちゃう?知らんけど」。
他のメンバーも似たような経験の者が数名で、それぞれChatGPT先生にお伺いを立てたり、ブログやYoutubeで紹介される事例を漁ったりからのスタートとなった。
こんなのは?これってできる?答えは誰も持っておらず、とにかくやってみるしか、道は開けないのだ。
漢達の熱き戦い
こうして、実に心配な漢達の熱き戦いは始まった。
依頼を受けたのは、GW直前。
「とりあえず、GW明けにそれぞれ何か情報を持ち寄ってみましょか」程度のスタートを切った彼ら。
そんな想定で大丈夫か?と天が語りかける。
しかしGW明け、本PJのリーダーは驚くこととなった。
組み込み班のメンバーが持ち寄ったものが、ほぼ完成品だったのだ。
ある者は実際に組んでみての課題感を話し、別の者がその課題の解を掴んでいた…なんてシナジーも発生した。
ある者は外部電力として電池パックを必要とするモータードライバーを使用したために省スペース化に悩んだが、ある者が外部電力不要なモータードライバーを使用していた といった具合だ。
そうした個々の努力が結実し、モーター制御の課題は早くもクリアされたのだった。
もちろん簡単だったというわけではなく、ゴールデンウィークを賭して取り組んだ、漢達の情熱の生んだ成果であったことは書き足しておきたい。
ディーネットは、こういったエンジニアの情熱に長年支えられてきている!
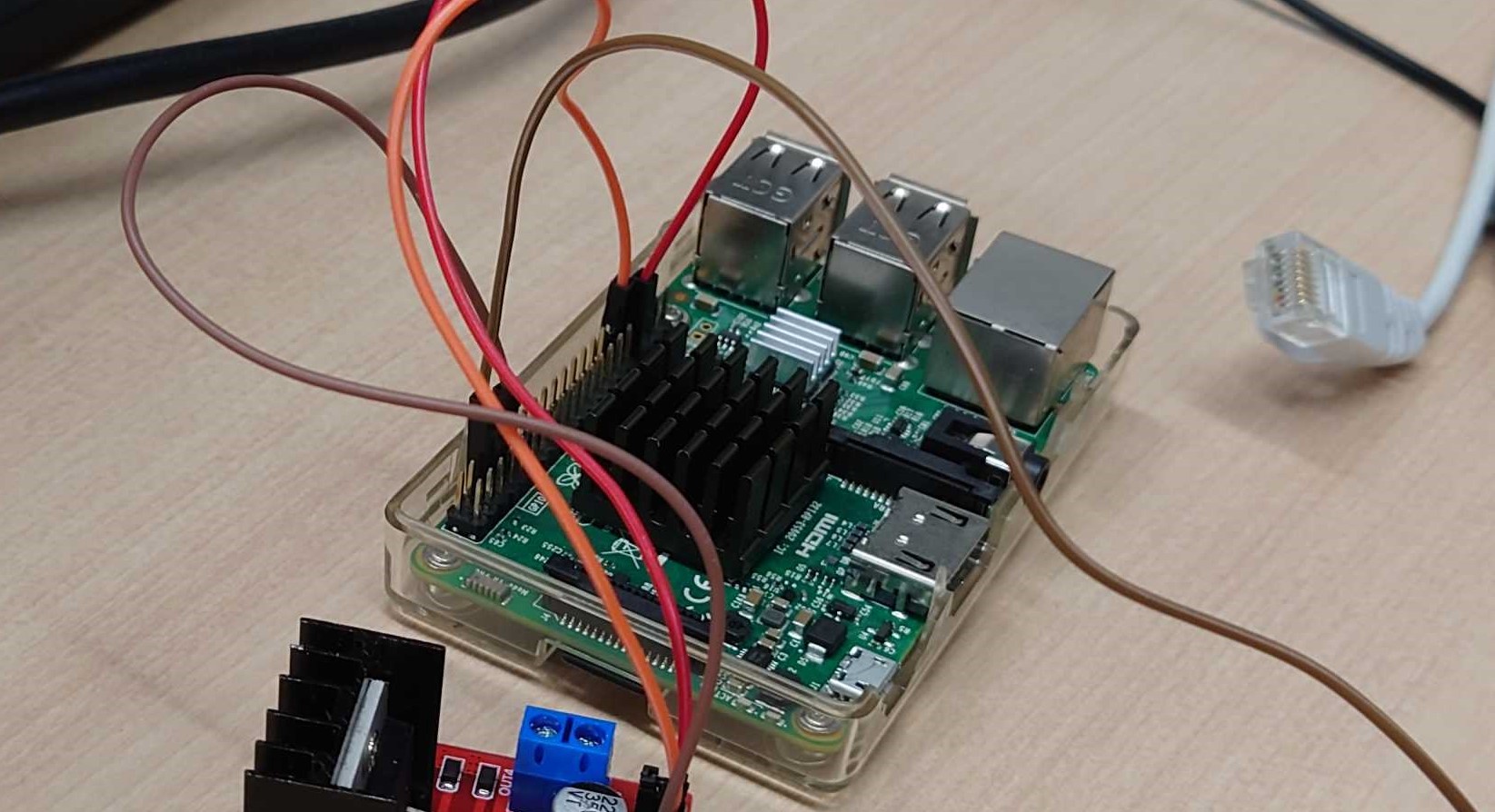
とにかくラズパイによるモーター制御はクリアした。次の段階は、現物での動作テストだ。
ということで、見た目度外視!テープバリバリで組んだプロトタイプが、こちらである。
まだまだクリアすべき課題は山積みだ!
こうして、ラズパイによる制御でモーターの
- 回転の開始 / 停止
- スピード調整(可変)
をプログラマブルにすることに成功した彼ら。
しかし、まだまだ戦いは終わっていない。
- モーター音がうるさくないか?
- ジオラマに載せてもちゃんと動くのか?
- 長時間動き続けられるのか?
…
課題は山積みである。
また正直、浮かんだアイデアの1割も盛り込めてないのが実情だ。
もっと面白い回し方はできないか?今後もどんどん改良していく所存である。
果たして、本番の展示は上手くいくのだろうか?
その答えは……ぜひ当社出展イベントにて、実物を見に来てください ^_-

テクニカルサポートとして、日々お客様の悩み事解決を支援しております。
スーパーエンジニアになるべく、日々、自宅でのウェイトトレーニングに励んでいます。
LINK
クラウドベリージャム:プロフィールページ